
Soft Rotary Pneumatic Actuator
Background
Most rotary soft actuators have a large aspect ratio which is the dimension of length divided by width or radius. It is because those actuators rely upon accumulation of rotation in the longitudinal twisting. In contrast, aspect ratios of electric motors that are widely used in the current industry are small.
Summary
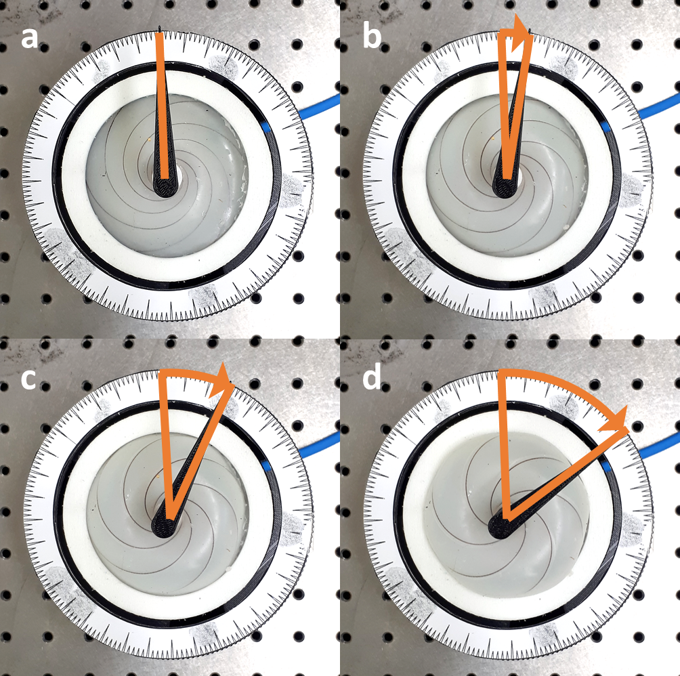
we investigate the low aspect ratio, soft fiber-reinforced, pneumatic actuator. A rotary actuator comprised of a hyper-elastic elastomer, a strain-limiting fiber set, and output rotating shaft is proposed. A new soft actuator is working with accumulation of twist in radial. That scheme guarantees the low aspect ratio.
Jamming Mechanism
Background
In the field of soft robots, jamming is being used in various fields. Looking at the use of previous jamming, jamming is a principle of obtaining the required stiffness by changing the stiffness of a joint, exoskeleton, or manipulator. There are many ways to use jamming, but it is not clear how to increase the efficiency of jamming. Therefore, research is needed to optimize the jamming effect.
Summary
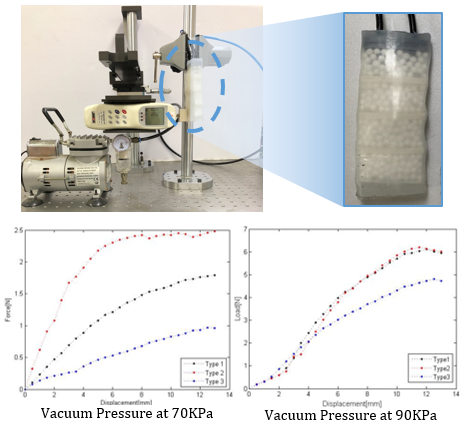
The main goal of this study is to increase the stiffness by the jamming effect. In order to accomplish this study, we need to know about interactions between particles. The characteristics of particle interaction are analyzed through experiments. Furthermore, by studying the backbone mechanism, we optimize the stiffness by the jamming effect.
Series Elastic Actuator Using Scotch Yoke
Background
Recently, Series Elastic Actuator(SEA) has been popularly used as a torque sensor thanks to its notable ability to calibrate the relation between torque and displacement. It has been applied to many robotic applications and used in a various industrial automation fields. However, most of the current SEAs have nonlinear torque-displacement characteristics which could not be easily alleviated. In order to be utilized as a feasible torque sensor, the wide linearity of a SEA in torque-displacement relationship is not an option. Also, adjustable compliance is needed to implement a mechanism with different stiffness, depending on the various cases where SEA can be applied.
Summary
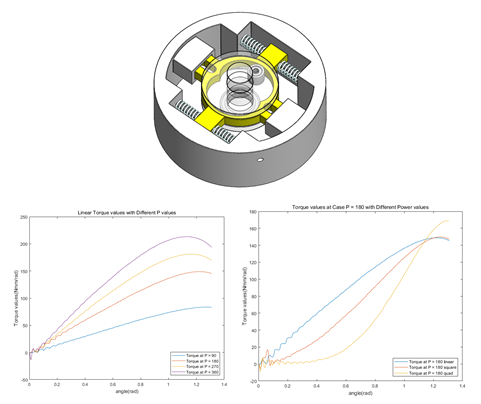
We designed a Variable Stiffness Linear Series Elastic Actuator mechanism using the Scotch Yoke mechanisms which can achieve variable stiffness with a linear relationship between torque and displacement. Simulation of the designed model then verifies that the model can properly implement linearity and variable stiffness.