


Micro moving mechanism like earthworm with Artificial Muscle
- OVER VIEW -
Polymers are recently getting more attention as new actuation energy transformers in many different application fields mainly thanks to their lighter weight and higher efficiency compared to traditional electromagnetic transducers. Although several polymeric energy transforming materials are available for current transducer researches, electroactive polymers (EAP) seem to have great potential to be a successful new alternative actuator. Various EAPs including ionic polymer metal composite (IPMC), conducting polymer (CP), polymer gels, dielectric elastomer, and piezoelectric polymer are adopted for new kinds of transducer constructions although most of them have many technical problems so it is yet far from actual implementation for industry application. In spite of the technical difficulties their application areas are rapidly expanding by many frontier researchers especially in robotic research fields since actuation mechanism of the polymers is similar to human muscle.
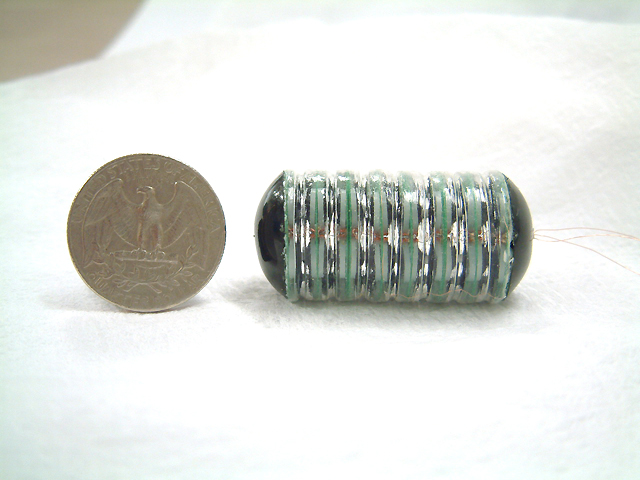
Prototype III
A micro robot, mimicking annealed animals like the earthworm is developed. The robot composed of several ringlike segments. Each segment is able to generate three degree-of-freedom motion. The soft actuator, called ANTagonistically-driven Linear Actuator(ANTLA), is based on polymer dielectrics and is has muscle like characteristics capable of performing motion such as forward, backward, and controllable compliance.
- Diameter : 20 mm
- Length : 45 mm
- Weight : 4.7 g
- Speed : 2.5mm/sec- DOF : 3DOF - Fabrication : Non pre-strained
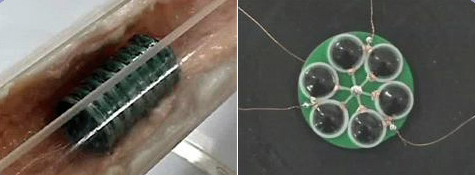
Prototype II (Ver.2)

- Diameter : 20 mm
- Length : 35 mm
- Weight : 3.5 g
- Speed : 1mm/sec
- DOF : 3DOF
- Fabrication : pre-strained
Prototype II (Ver.1)
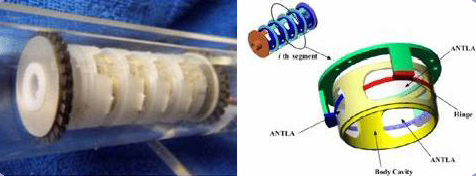
- Diameter : 40 mm - Length : 80 mm
- Weight : 25 g - Speed : 1mm/sec
- DOF : 3DOF - Fabrication : pre-strained
Publications
-
•Kwangmok Jung, Jaedo Nam, Youngkwan Lee, Hyoukryeol Choi, "Micro Inchworm Robot Actuated by Artificial Muscle Actuator baased on Non-prestrained Dielectric Elastomer " SPIE Smart Structures and Materials 2004 Electroactive Polymer Actuators and Devices, pp. 357-367, 2004.
-
•오신종, 김훈모, 최혁렬, 전재욱, 남재도, "캡슐형 내시경 로봇의 IPMC 엑추에이터 모델링 및 퍼지 제어 알고리듬 개발에 대한 연구" 한국정밀공학회지 제20권 제4호, pp. 39-48, 2003.
-
•오신종, 김훈모, 최혁렬, 전재욱, 남재도, "캡슐형 내시경 로봇의 IPMC 액츄에이터 모델링 (Modeling of IPMC Actuator for the Endoscopic Microcapsule)" 대한기계학회 춘추학술대회 2001년 제2권 제1호, pp. 660-666, 2001.
-
•최혁렬, 정광목, 남재도, "고분자 구동기를 이용한 마이크로 로봇" 한국정밀공학회 춘계학술대회, pp. 334-337, 2003.
-
•H. R Choi, S. M Ryew, K. M Jung, H. M Kim, J. W Jeon, J. D Nam, R. Maeda, and M. Tanie, "Micro Robot Actuated by Soft Actuators Based on Dielectric Elastomer " Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 1730-1735, 2002.
-
•H. R. Choi, "Micro Robot Actuated by Artificial Muscle Actuators Based on Dielectric Elastomer" 2nd China-Korea Workshop on Robotics, pp. 51-56, 2002.
-
•Kyoil Hwang, Hunmo Kim, Hyoukryeol Choi, Jaewook Jeon, Jaedo Nam, Dynamic modeling of the electrostrictive polymer to make microendscope robot, in Proc. IEEE Int. Conf. Engineering in Medicine and Biology Society, , 2001/10/25 ~ 10/28
-
•Sunghwi Cho, Sungmoo Ryew, Jaewook Jeon, Hunmo Kim, Jae-do Nam, Hyoukryeol Choi, Ryutaro Maeda, Compliant Micro Actuator made from Dielectric Elastomer, in Proc. Int. Conf. Control, Automation and Systems, pp. 776-779, 2001/10/17 ~ 10/21
-
•Sunghwi Cho, Sungmoo Ryew, Jae wook Jeon, Hunmo Kim, Jae- Do Nam, Hyoukryeol Choi, "Development of micro inchworm robot actuated by electrostrictive polymer actuator" SPIE Smart Structures and Materials 2001 Electroactive Polymer Actuators and Devices, pp. 466-474, 2001.
-
•Kwangmok Jung, Sungmoo Ryew, Hunmo Kim, Jae-do Nam, Jae wook Jeon, Hyoukryeol Choi, "Realization of Cilia Motion of Annelida by Distributed IPMC Actuators " Proc. Int. Conf. Control, Automation and Systems, pp. 780-783, 2001.
Project
-
-
•과학기술부 21세기 프론티어개발사업인 지능형마이크로시스템개발사업단
고분자 액츄에이터를 이용한 캡슐형 내시경 구동메카니즘 기반기술 연구 (2000. 5. 1 ~ 2003. 6. 30)
-
•과학기술부 21세기 프론티어개발사업인 지능형마이크로시스템개발사업단
Researcher
Contact: Prof. H. R. Choi ( hrchoi@me.skku.ac.kr )