


BioRobot platform for intergrated clinical test
- OVER VIEW -
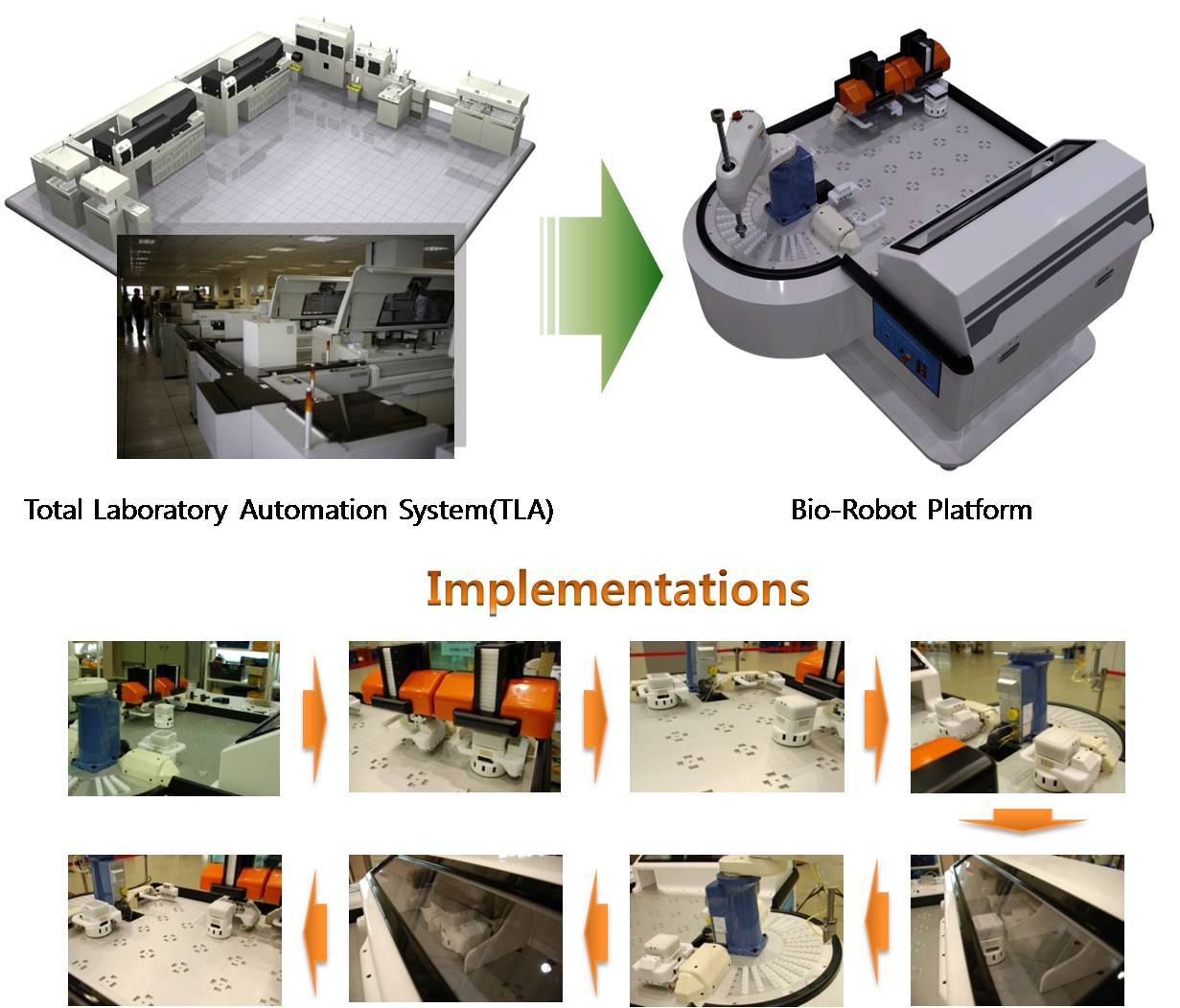
We study a new robotic platform for automated clinical test. The robotic platform is named BioRobot platform, and it is composed of BioRobot platform II and Mobile agent. The BioRobot platform II consists of several major function blocks such as manipulation, transportation and detection, incubation, docking, and each of them is designed as a module of the system. The basic functions of the BioRobot platform are enlisted as loading of the sample and reagent, identification of sample, test planning, dispensing of the sample and reagent, transfer, incubation, and detection.
Landmark Search Technique
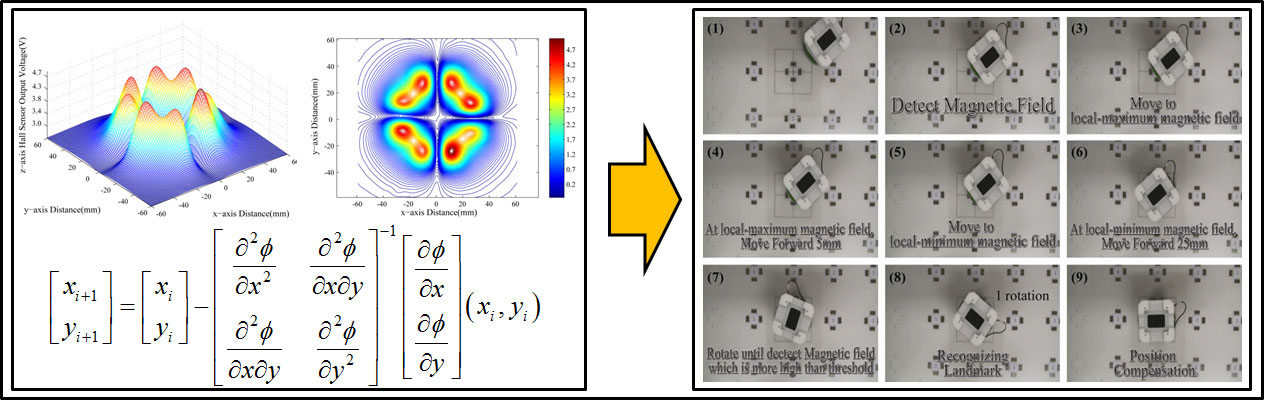
The mobiles robots search a pattern of magnets set by rotating, and obtain the current global pose information by comparing the measured neighboring patterns with the map information that is saved in advance. Thus, first landmark searching method was essential to use this technique. To solve this problem, a technique that the robot which was located without any prior knowledge of it's position uses gradient descent method to find and recognize the first magnetic landmark were developed.
Global Localization using Magnetic Landmarks
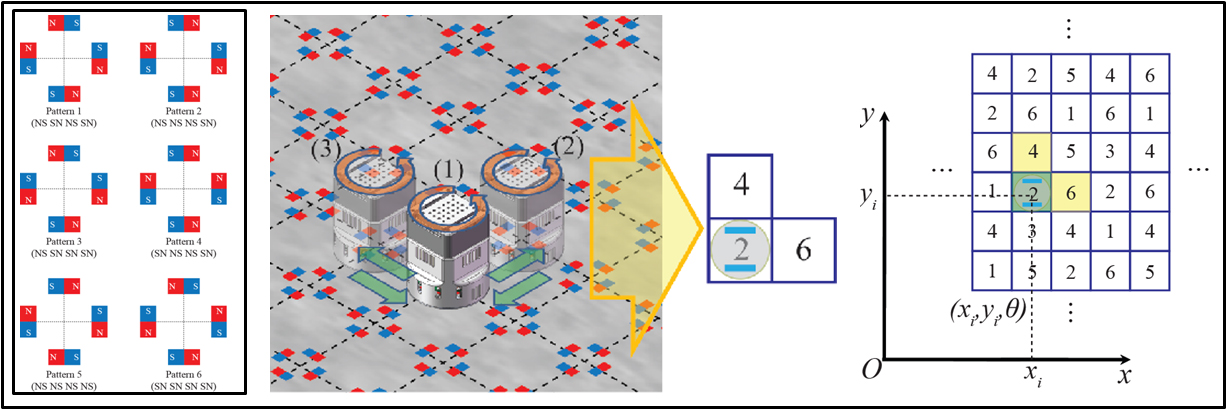
Our mobile robot can compensate position errors correctly on the surface of indoor environment with magnets sets by arbitrary arrange the magnets sets of identical pattern in the workspace. And also, it can realize the global localization by changing arrangement of magnet pole. The basic arrangement of magnets set utilize the rectangular configuration using the four permanent magnets. For case of the rectangular configuration total six patterns are occurred. The virtual map can be built using the total six magnets landmark patterns. The moving mobile robot based on four-way connectivity searches the patterns of the magnets set landmark of current pose and the neighboring magnets set landmarks in the current position without any prior knowledge. Then, as compared with map information that is generated and stored in advance, it estimate the its current position.
Prototype II (BioRobot Platform II)
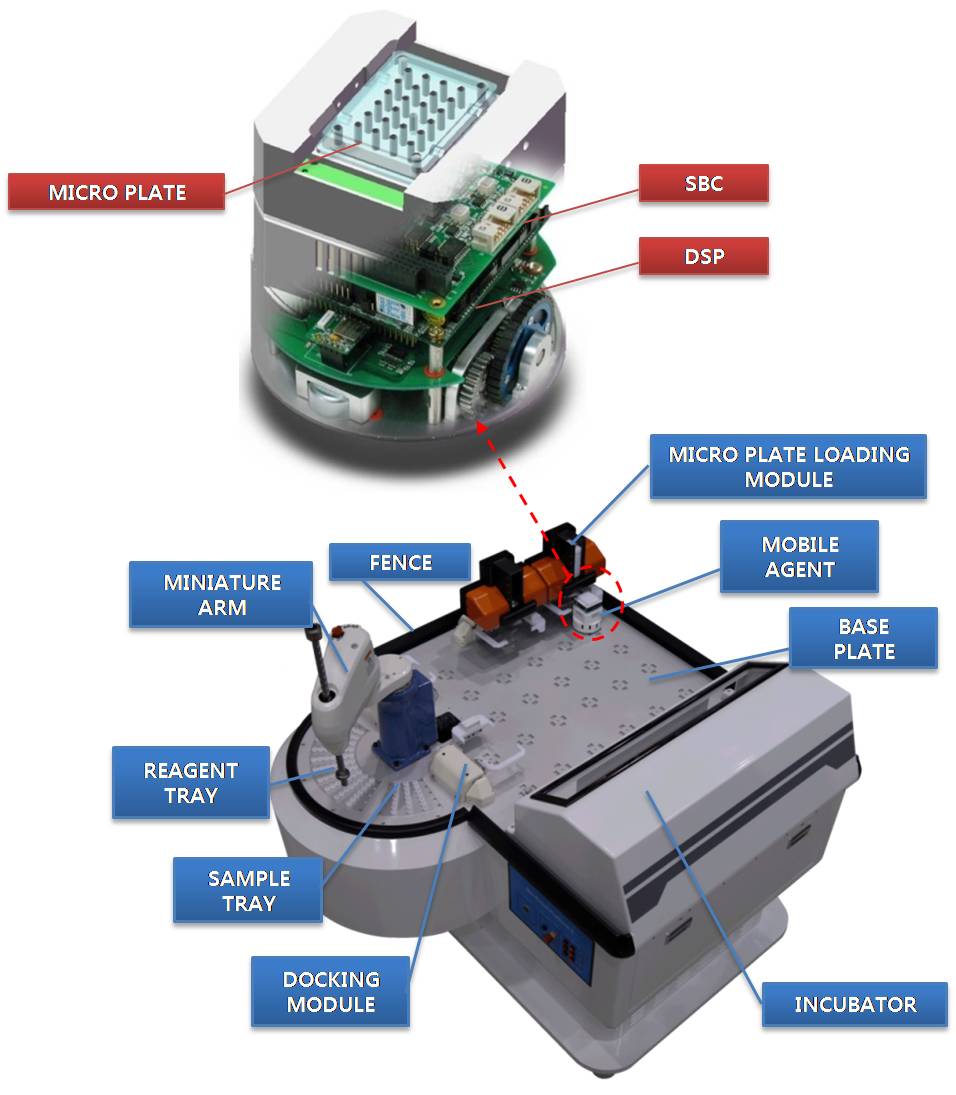
Platform Ⅱ is a new robotic platform for clinical tests suitable for small or medium sized laboratories using mobile robots. The mobile robot called mobile Agent is designed as transfer system of blood samples, reagents, microplates, and any instruments. Also, the developed mobile agent can perform diverse tests simultaneously based on its cooperative and distributed ability.
- Intelligent BioRobot Platform for Integrated Clinical Test.
- Clinical Test by using mobile agent.
- Each mobile agent communicates with other agents by using Bluetooth communication.
- The RFID system is used to recognize patient information.
- The magnetic hall sensor is embedded
to remove and compensate the cumulated error of locomotion at the bottom of mobile agent.
Prototype I (BioRobot Platform I)

The platform Ⅰ is designed to minimize the consumption of reagents, and to easily integrate various testing equipments since it is functionally modularized. It is aimed to accommodate 70 kinds of clinical tests, which are the most frequently conducted in hospitals.
- Intelligent BioRobot Platform for Integrated Clinical Test.
- The BioRobot platform Ⅰ consists of sample tray, part of supply for pipettes and micro plates, robotic manipulator, reagent chamber module, incubator module, photometry scanner etc.
- The robot performs more than seventy Clinical Test.
Publications
- • 유원석, 최병준, 문형필, 구자춘, 정완균, 최혁렬, "마그네틱 랜드마크의 자기장 특성을 이용한 모바일 로봇의 위치 인식 기술 개발", 대한기계학회 동역학 및 제어 부문 춘계학술대회 pp./05/25-2011/05/27, 대한민국
- • Byung June Choi, Bum Soo Kim, Won Suk Yu, Seung Hoon Shin, Hyungpil Moon, Ja Choon Koo, Sung Moo Ryew Woong Hee Son, Suk Joong Kim, Sangdeok Park, Wankyun Chung, "Development of Mobile Agents Based Robotic Platform for Flexible Laboratory Automation", LabAutomation 2010, N/A (Poster), 2010, USA
- • Seung Hoon Shin, Byung June Choi, Sung Moo Ryew, Jung Woo Kim, Dae Shick Kim, Wan Kyun Chung, Hyouk Ryeol Choi, Ja Choon Koo, "A Virtual Clinical Lab Test Machine for the Verification of Job Scheduling", LabAutomation 2010, N/A (Poster), 2010, USA
- • Byung June Choi, Won Suk You, Seung Hoon Shin, Hyungpil Moon, Ja Choon Koo, Wankyun Chung, Hyouk Ryeol Choi, "Robotic Laboratory Automation Platform based on Mobile Agents for Flexible Clinical Tests ", IEEE Conference on Automation Science and Engineering 2010 (ICASE 2010), pp.186-191, 2010, Canada
- • 유원석, 최병준, 김범수, 문형필, 구자춘, 최혁렬, "Development of Global Localization for Mobile Robot using Magnetic Landmarks", 한국지능로봇 하계 종합 학술대회, pp.117-120, 2010, 한국
- • Seung Hoon Shin, Byung June Choi, Sung Moo Ryew, Jung Woo Kim, Dae Shick Kim, Wan Kyun Chung, Hyouk Ryeol Choi, and Ja Choon Koo, "Development of an Improved Scheduling Algorithm for Lab Test Operations on a Small-Size Bio Robot Platform", Journal of the Association for Laboratory Automation, Vol 15, No. 1, pp.15~24, 2010, USA
- • Byung June Choi, Bumsoo Kim, Sung Moon Jin, Ja Choon Koo, Wan Kyun Chung, Hyouk Ryeol Choi and Hyungpil Moon, "Magnetic landmark based position correction technique for mobile robots with hall sensors", Intelligent Service Robotics, vol. 3, no. 2, pp. 99-113, 2010, Korea
- • Byung June Choi, Won Suk You, Hyouk Ryeol Choi and Hyungpil Moon, "Tessellation of the Plane with Magnetic Landmarks for Pose Control and Global Localization", Electronics Letters, vol. 46, no. 14, pp. 993-995, 2010, USA
- • 김범수, 최병준, 유원석, 문형필, 구자춘, 최혁렬, "마그네틱 랜드마크를 이용한 모바일 로봇의 위치 인식 및 보정 기술의 개발", 로봇공학회 논문지, Vol.5 , No.3, pp.186-196, 2010, 한국
- • Won Suk You, Byung June Choi, Bumsoo Kim, Hyungpil Moon, Ja Choon Koo, Wankyun Chung and Hyouk Ryeol Choi, "Global Localization for a Small Mobile Robot using Magnetic Pattern", IEEE Int. Conf. Robotics and Automation (ICRA2010), pp.2618-2623, 2010, USA
- • 최병준, 김범수, 유원석, 신승훈, 문형필, 구자춘, 정완균, 최혁렬, "진단검사를 위한 모바일 에이전트 기반의 유연 검사실 자동화 플랫폼 개발", 대한의료로봇학회 학술대회, pp.61-62, 2009, 한국
- • Byung June Choi, Bumsoo Kim, Joo Young Chun, Hyungpil Moon, Ja Choon Koo, Wankyun Chung and Hyouk Ryeol Choi, "Magnetic Patterns based Global Localization for a Mobile Robot using Hall Sensors", IEEE Int. Conf. Mechatronics and Automation, pp.192-197, 2009, China
- • Bumsoo Kim, Byung June Choi, Joo Young Chun, Hyungpil Moon, Ja Choon Koo and Hyouk Ryeol Choi, "Position Correction Technique for Mobile Robot using Magnetic Hall Sensors", Int. Conf. Service and Interactive Robotics (SIRCon2009), 2009, Taiwan
- • 최병준, 진성문, 김범수, 문형필, 구자춘, 정완균, 최혁렬, "다개체 모바일 로봇의 동적 경로 계획 알고리즘 개발", 한국지능로봇 하계 종합 학술대회, pp.421-422, 2008, 한국
- • 김범수, 최병준, 진성문, 문형필, 구자춘, 정완균, 최혁렬, "홀센서를 이용한 이동로봇의 위치 보정 기술의 개발", 한국지능로봇 하계 종합 학술대회, pp.419-420, 2008, 한국
- • 진성문, 최병준, 김범수, 문형필, 구자춘, 정완균, 최혁렬, "A* 알고리즘을 이용한 다개체 모바일 로봇의 경로 생성 및 주행 알고리즘 개발, 한국지능로봇 하계 종합 학술대회, pp.225-226, 2008, 한국
- • 신승훈, 진성문, 최병준, 최혁렬, 김정우, 류성무, 안기탁, 정완균, 구자춘, "효율적인 병리검사를 위한 향상된 바이오 로봇 시스템과 Rescheduling", 한국지능로봇 하계 종합 학술대회, pp.488-489, 2008, 한국
- • 최병준, 진성문, 김범수, 박재훈, 문형필, 구자춘, 정완균, 최혁렬, "최적 경로 및 충돌 회피를 위한 다개체 모바일 로봇의 동적 경로 계획 알고리즘", 대한기계학회, pp.174-176, 2008, 한국
- • Bumsoo Kim, Byung Jun Choi, Sung Moon Jin, Hyungpil Moon, Ja Choon Koo, WanKyun Chung, Hyouk Ryeol Choi, "Development of Position Correction Technique for Mobile Robot using Magnet Hall Sensor", Int. Conf. Ubiquitous Robots and Ambient Intelligence (URAI 2008), pp.173-178, 2008, Korea
- • Sung Moon Jin, Bumsoo Kim, Byung Jun Choi, Hyungpil Moon, Ja Choon Koo, WanKyun Chung, Hyouk Ryeol Choi, "Development of Path Planning Algorithm using A* Search Method for Multi-Robot System", Int. Conf. Ubiquitous Robots and Ambient Intelligence (URAI 2008), pp.129-134, 2008, Korea
- • Byung June Choi, Sung Moon Jin, Seung Hoon Shin, Ja Choon Koo, Sung Moo Ryew, JinHyun Kim, Woong Hee Son, Ki Tak Ahn, Wankyun Chung, Hyouk Ryeol Choi, "Development of Flexible Laboratory Automation Platform using Mobile Agents in the Clinical Laboratory", Int. Conf. Automation Science and Engineering (IEEE CASE 2008), pp.918-923, 2008, USA
- • Hyouk Ryeol Choi, Byung June Choi, Sung Moon Jin, Seung Hoon Shin, Ja Choon Koo, Min Cheol Kim, JinHyunKim, Woong Hee Son, Ki Tak Ahn, Wankyun Chung, "Development of Flexible Mobile Agents for BioRobot System in the Clinical Laboratory", Int. Conf. LabAutomation(LabAutomation2008), pp.123, 2008, USA
- • Ja Choon Koo, Seung Hoon Shin, Byung June Choi, Sung Moon Jin, Houk Ryeol Choi, Sung Moo Ryew, Jung Woo Kim, Ki Tak Ahn, Wankyun Chung, “Development of an Improved Scheduling Algorithm for Lab Test Operations on a Small Size BioRobot Platform ” Int. Conf. LabAutomation(LabAutomation2008), pp.162, 2008, USA.
- • Byung June Choi, Sung Moon Jin, Seung Hoon Shin, Ja Choon Koo, Sung Moo Ryew, JinHyun Kim, Woong Hee Son, Ki Tak Ahn, Wankyun Chung and Hyouk Ryeol Choi, “Development of Flexible BioRobot Platform for Integrated Clinical Test” Journal of Association for Laboratory Automation, Vol.13, No.2, pp.90-96, 2008.
- • 최병준, 진성문, 신승훈, 구자춘, 김민철, 김진현, 손웅희, 안기탁, 정완균, 최혁렬, “임상병리검사를 위한 모바일 에이전트 기반의 바이오로봇 시스템 개발” 로봇공학회 논문지, 제2권, 제4호, pp. 316~325, 2007
- • 신승훈, 김정우, 진성문, 최병준, 최혁렬, 류성무, 정완균, 손웅희, 구자춘, “효율적인 Bio Robot 운용을 위한 작업 Scheduling 알고리즘에 관한 연구” 제2회 한국로봇공학회 하계종합 학술대회, pp.362~367, 2007, 한국.
- • 최병준, 진성문, 신승훈, 구자춘, 류성무, 김진현, 손웅희, 안기탁, 정완균, 최혁렬, “진단검사를 위한 지능형 바이오로봇 플랫폼의 개발” 제2회 한국지능로봇 하계종합 학술대회, pp.492~499, 한국.
- • 최병준, 진성문, 신승훈, 구자춘, 김민철, 김진현, 손웅희, 안기탁, 정완균, 최혁렬, “임상병리검사를 위한 모바일 에이전트 기반의 바이오로봇 시스템 개발” 제2회 한국지능로봇 하계종합 학술대회, pp.484~491, 2007, 한국.
- • Byung June Choi, Sung Moon Jin, Seung Hoon Shin, Ja Choon Koo, Sung Moo Ryew and Hyouk Ryeol Choi, JinHyun Kim, Woong Hee Son, Ki Tak Ahn, Wankyun Chung, “Development of Intelligent BioRobot Platform for Integrated Clinical Test” The 4th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2007), pp.417-422, 2007, Korea.
- • Byung June Choi, Sung Moon Jin, Seung Hoon Shin, Ja Choon Koo, Min Cheol Kim and Hyouk Ryeol Choi, JinHyun Kim, Woong Hee Son, Ki Tak Ahn, Wankyun Chung, “Development of Flexible Mobile Agents for BioRobot System in the Clinical Laboratory” The 4th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2007), pp.423-428, 2007, Korea.
- • Seung Hoon Shin, Sung Moon Jin, Byung June Choi, Hyouk Ryeol Choi, Ja Choon Koo, Jung Woo Kim, Sung Moo Ryew, Wankyun Chung, Woong Hee Son, “Development of a scheduling algorithm for efficient tests on Bio Robot” The 4th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2007), pp.523-527, 2007, Korea.
- • H. R. Choi, B. J. Choi, K. H. Noh, J. W. Kim, S. M. Jin, J. C. Koo, S. M. Ryew, J. H. kim, W. H. Son, K. T. Ahn, W. K. Chung, “Development of Intelligent BioRobot System for Integrated Clinical Test” LabAutomation 2007, 2007, U.S.A.
- • H. R. Choi , J. C. Koo, J. W. Kim, B. J. Choi, K. H. Noh, S. M. Ryew, J. H. Kim, W. H. Son, K. T. Ahn, W. K. Chung, “Development of Automatic Scheduling Algorithms for personalized BioRobot of the Laboratory Clinical Tests” LabAutomation 2007, 2007, U.S.A.
- • Byung June Choi, Kyuho Noh, Jung Woo Kim, Sung Moon Jin, Ja Choon Koo, Sung Moo Ryew, Jinhyun Kim, Woong Hee Son, Ki Tak Ahn, Wankyun Chung and Hyouk Ryeol Choi, “Intelligent BioRobot Platform for Integrated Clinical Test” SICE-ICASE International Joint Conference 2006, pp.5828~5832, 2006, 한국.
- • Jung Woo Kim, Byung june Choi, Kyu ho Noh, Hyouk Ryeol Choi, Ja Choon Koo, Sung Moo Ryew, Jin hyun Kim, Woong Hee Son, “Automatic Scheduling Algorithm for Personalized Clinical Test” SICE-ICASE International Joint Conference 2006, pp.5823~5827, 2006, 한국.
Project
-
-
• 지식경제부
POCT용 바이오로봇 기술개발 (2010. 8. 1 - 2012. 7. 31 )-
• 지식경제부
진단검사용 작업계획 알고리즘 및 차세대 플랫폼 운용기술 개발 (2009. 8. 1 - 2010. 7. 31 )
-
• 산업자원부
차세대 진단검사용 로봇을 위한 시스템 제어기 및 intelligent clinical test planner 개발 (2005. 8. 1 - 2008. 7. 31)
-
-
Researcher