


Soft Wearable Robot

Soft wearable robots are a type of wearable technology made from flexible materials that can conform to the wearer's body shape and movement patterns. They can assist with tasks in fields such as medical rehabilitation, physical therapy, sports training, and industrial settings. Soft wearable robots use sensors, actuators, and control systems to detect and respond to the wearer's movements in real-time, improving performance and reducing the risk of injury.
Soft wearable robots are more comfortable, adaptable, and effective compared to traditional rigid wearable robots for augmenting or assisting human movements. They are made from flexible materials, can be customized, and use sensors and control systems for precise and responsive support.
Principle of Fabric Muscle
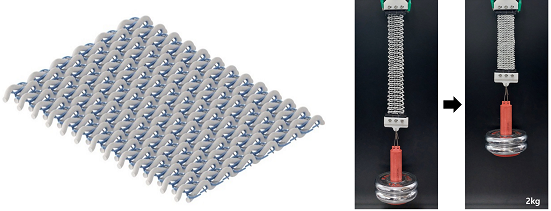
Fabric muscle is a soft robotic actuator made from composite materials, consisting of shape memory alloy (SMA) woven together with other functional fibers to form a fabric that can contract and expand like a human muscle when an electrical current is applied. By arranging the fabric muscle according to ergonomic features, soft wearable robots can be created that conform to the wearer's body and movement patterns, providing precise and responsive support to assist with various tasks.
Publications
- • 신동수, 김기현, 박재형, 공영진, 최혁렬, "지그재그 형태의 형상기억합금 구동기 설계 최적화", 제18회 한국로봇종합학술대회, 2023.02.15~ 02.18
- • KH Kim, DS Shin, SY Yang, JH Park, YJ Gong, HR Choi, "Active Yarn Actuator from Shape Memory Alloy", 2022 19th International Conference on Ubiquitous Robots (UR) Jeju, Korea, July 4-6, 2022
- • 신동수, 김기현, 양상율, 박재형, 공영진, 최혁렬, "형상기억합금 기반 섬유형 구동기", 제17회 한국로봇종합학술대회, 2022.05.11~ 05.14
- • SY Yang, KH Cho, Y Kim, K Kim, JH Park, HS Jung, JU Ko, H Moon, JC Koo, H Rodrigue, JW Suk, HR Choi, "Soft fabric actuator for robotic applications", 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
Project
-
• 한국연구재단
근력/재활 보조 가능한 초경량 의복형 착용로봇을 위한 직물형 구동기 연구 (2021.03.01 ~ 2025.02.28)
Researcher
Ki Hyeon Kim, Dong Su Shin