


Tactile Sensor for Robot Fingertip
- OVER VIEW -
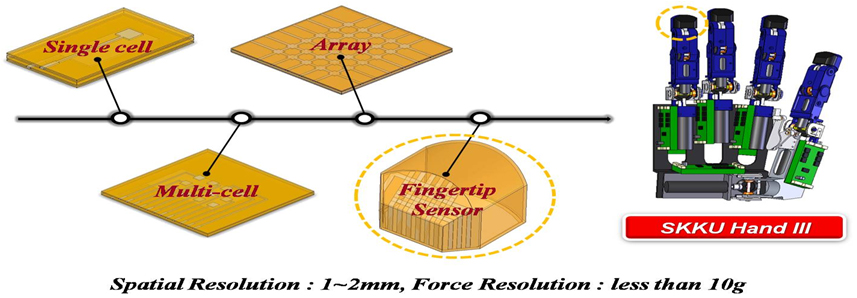
Tactile sensor provides pressure and contact position information about the robot fingertip surface in contact with objects or the environment. It uses a new synthetic dielectric elastomer which has high flexibility as a base material. So it can be easily covered onto the complex surfaces. All of the electronics are embedded, the tactile sensor and the signal conditioning part are inside of the robot fingertip, while only the microcontroller circuit is separated. The tactile sensor is based on a capacitive sensor technology which usually used in the last generation of cellular phones.
The design of robot fingertip tactile sensor
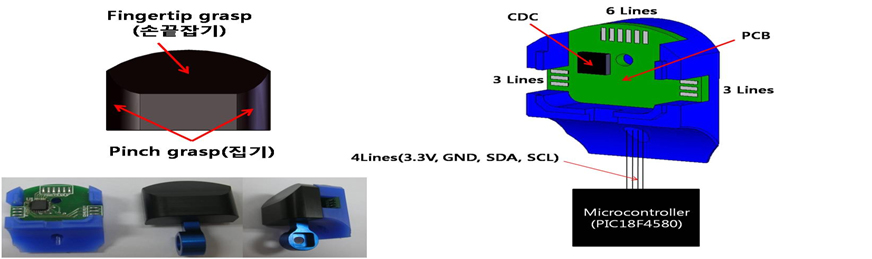
The fingertip can be discriminated into three parts depending on the grasping modalities such as pinch grasp and fingertip grasp. The fingertip grasp uses a bottom of fingernail, the pitch grasp that hold a small and long object strongly and safety uses a side of fingertip. The capacitive tactile sensor consists of two conductive layers separated by a soft dielectric material made of NBR. The inner conductive layer includes 12 sensitive zones which are made of copper pad on the fingertip surface. The spatial resolution between two electrodes is approximately 2mm.
The fabrication process of fingertip tactile sensor
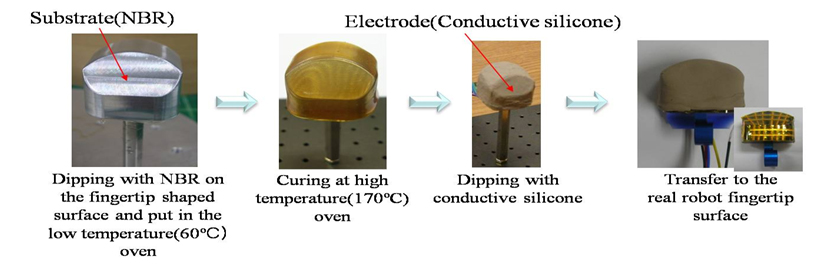
The main fabrication method of a fingertip tactile sensor is dipping. First of all, we make one fingertip shaped structure using aluminum and dipping the NBR solution many times on it. After curing this material at high temperature(about 170 degree) oven, we can get the soft dielectric elastomer. Then we dipping the conductive silicone which mix with a solvent on the dielectric surface to make a conductive ground plane. After curing conductive layer at room temperature, we transfer this fingertip shape material to the real robot fingertip which includes 12 electrodes on it. Finally, if we connect the wire between each electrode and embedded PCB, we can finish to make the fingertip tactile sensor.
Publications
- • Kim, D. S., Chuc, N. H., Jin, S. M., An, K. J., Phuc, V. H., Koo, J., Lee, Y., Nam, J., Choi, H. R., "A flexible fingertip tactile sensor", Electroactive Polymer Actuators and Devices (EAPAD) 2010, Proceedings of SPIE Vol. 7642, 76420F (2010), 2010. 03. 07. ~ 2010. 03. 12., USA
- • 김덕상, 진성문, 김백철, Nguyen Huu Chuc, Nguyen Huu Lam Voung, 안광준, Voung Hong Phuc, 구자춘, 문형필, 이영관, 남재도, 최혁렬, 유전탄성체를 이용한 로봇용 촉각센서의 개발, (사)제어, 로봇, 시스템 학회, (사)한국로봇학회 합동학술대회, pp.54-57, 2009/12/10-2009/12/11
- • 김덕상, 박종길, Nguyen Huu Chuc, Doan Vu Thuy, Nguyen Huu Lam Vuong, 최혁렬, 유전탄성체를 이용한 촉각센서에 관한 연구, 한국지능로봇 하계 종합 학술대회, pp.269-270, 2008/06/25-2008/06/27
Project
• 한국산업기술진흥원
전기활성고분자를 이용한 초소형 인공근육구동기 및 힘/토크 센서의 개발 (2009. 5. 1 ~ 2010. 4. 30)
Researcher
Contact : Prof. H. R. Choi ( hrchoi@me.skku.ac.kr )