


Robot-Assisted Minimally Invasive Surgery with Force-Feedback Capability
- OVER VIEW -
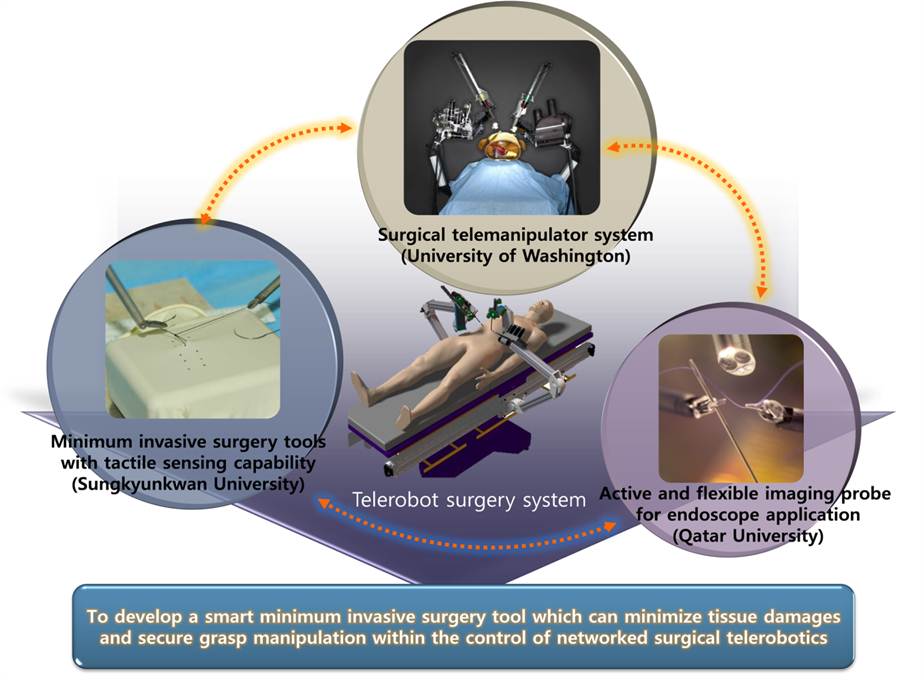
In this research we investigate a tactile sensing system and how to perform grasping manipulation while minimizing tissue damage. The major idea of the proposed research is summarized as to develop a smart minimally invasive surgery tool which can minimize local tissue damage and secure grasp manipulation based upon the tactile within the networked control of surgical telerobotics.
Sensorized surgical grasper for force-feedback system

Sensorized surgical grasper is built by integrating the multi-axis force sensors. The first type is the wrist-integrated force sensor. A miniature three-axis force sensor (diameter: 10 mm) was developed for minimally invasive robotic surgery (MIRS). The sensor is located at the wrist joint of a surgical instrument. The second type is the grasper-integrated force sensor. By adopting the capacitive transduction principle, the sensor enables the direct sensing of normal and shear forces at surgical instrument tips. Thus, three-DOF pulling forces and a single-DOF grasping force can be measured for haptic feedback control of robotic minimally invasive surgery systems.
Portable Surgical robot
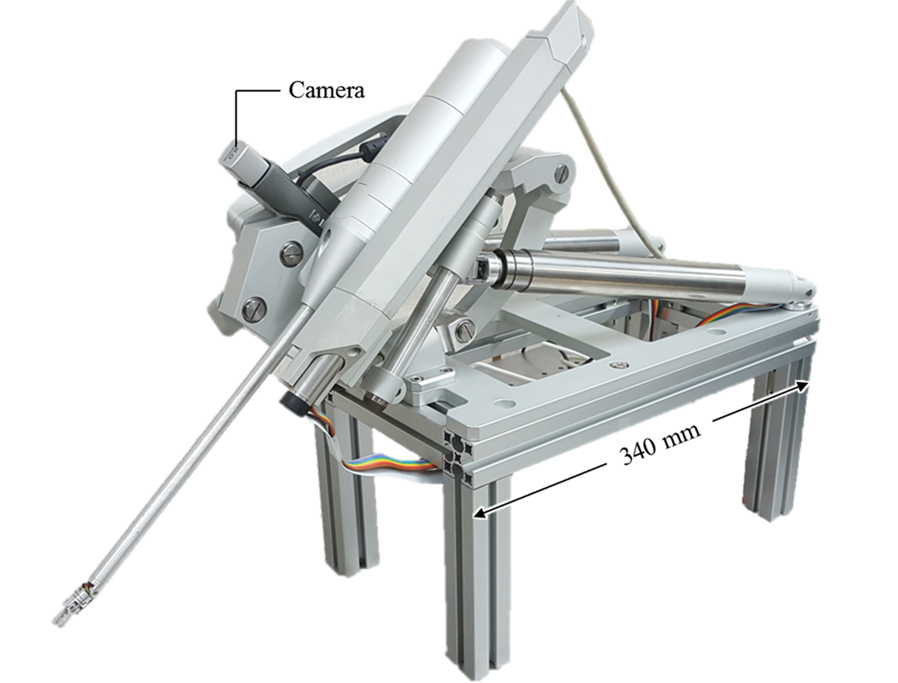
A surgical robot hardware, called ‘S-surge’, was developed in our lab. The S-surge was designed with the good portability for the tele-surgery in the remote site and the force sensing capability measuring three-axis manipulating and a single grasping forces. It is a 7-DOF robot composed of a 3-DOF based on the fixed remote center of motion (RCM) manipulator and a 4-DOF surgical instrument.
Simulated Surgical Environment
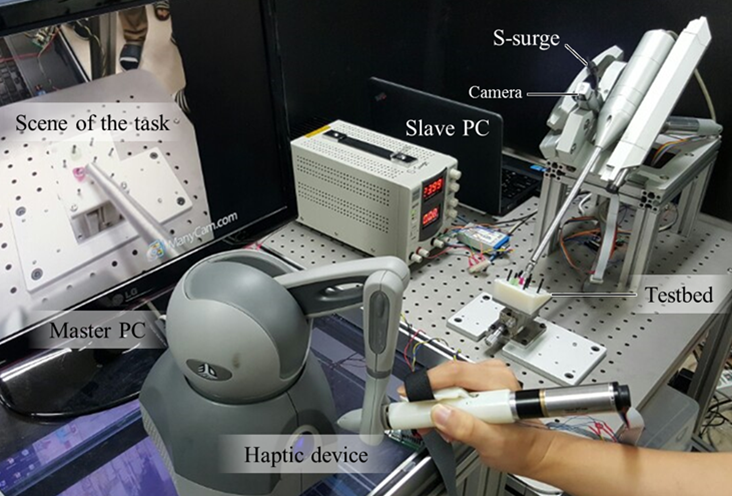
An experimental set-up including the developed robot and the master console is built. The control of the robot is based on the master-slave control using the console. The slave side consists of the developed robot, a robot control PC (slave PC), a camera, and a testbed. The testbed acts as a standard peg transfer task or a jig set assembled with our developed force sensing system. Then, we used a commercial master device (Phantom Omni, Sensable Co.) for the position input and the force feedback. A host PC transfers the master signal to the slave side, and it shows the surgical scene to a user.
Publications
-
• Dong-Yeop Seok, Yong Bum Kim, Uikyum Kim, Seung Yeon Lee, Hyouk Ryeol Choi, "Compensation of Environmental Influences on Sensorized-Forceps for Practical Surgical Tasks", IEEE Robotics and Automation Letters, Volume 4, Issue 2, pp 2031-2037
-
• Uikyum Kim, Yong Bum Kim, Dong-Yeop Seok, Jinho So, Yoon Haeng Lee, Hyouk Ryeol Choi, "Torque Sesor Embedded Actuator Module for Robotic Applications", IEEE/ASME Transactions on Mechatronics, 2018, vol.23, no.4
-
• Uikyum Kim, Yong Bum Kim, Dong-Yeop Seok, Jinho So, Hyouk Ryeol Choi, "Sensorized Surgical Forceps for Robotics-assisted Minimally Invasive Surgery", IEEE Transactions on Industrial Electronics, 2018, vol.65, Issue 12,pp. 9604-9613
-
• Uikyum Kim, Yong Bum Kim, Dong-Yeop Seok, Jinho So, Hyouk Ryeol Choi, "A Surgical Palpation Probe With 6-Axis Force/Torque Sensing Capabiity for Minimally Invasive Surgery", IEEE Transactions on Industrial Electronics, 2018, vol.65, Issue 12,pp. 2755-2765
-
• Uikyum Kim, Yong Bum Kim, Dong-Yeop Seok, Jinho So, Hyouk Ryeol Choi, "Development of Surgical Forceps Integrated with Multi-Axial Force Sensor for Minimally Invasive Robotic Surgery", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 3684-3689.
• Uikyum Kim, Dong-Yeop Seok, Yong Bum Kim, Dong-Hyuk Lee, Hyouk Ryeol Choi, "Development of a Grasping Force-Feedback User Interface for Surgical Robot System", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 845-850.
• Uikyum Kim, Yong Bum Kim, Dong-Yeop Seok, Jinho So, and Hyouk Ryeol Choi, "A New Type of Surgical Forceps Integrated with Thee-Axial Force Sensor for Minimally Invasive Robotic Surgery", International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), 2016, pp. 135-137.
• Dong-Hyuk Lee, Uikyum Kim, Tauseef Gulrez, Woon Jong Yoon, Blake Hannaford, and Hyouk Ryeol Choi, “A Laparoscopic Grasping Tool with Force Sensing Capability”, IEEE/ASME Transactions on Mechatronics, vol. 21, no. 1, pp. 130–141, 2016.
• Uikyum Kim, Dong-Hyuk Lee, Woon Jong Yoon, Blake Hannaford, and Hyouk Ryeol Choi, “Force Sensor Integrated Surgical Forceps for Minimally Invasive Robotic Surgery”, IEEE Transactions on Robotics, vol. 31, pp. 1214–1224, 2015.
• Uikyum Kim, Dong-Hyuk Lee, Hyungpil Moon, Ja Choon Koo, Hyouk Ryeol Choi, “Design and Realization of Grasper-Integrated Force Sensor for Minimally Invasive Robotic Surgery”, in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS2014), pp.4321-4326, 2014/09/14-2014/09/18.
• Dong-Hyuk Lee, Uikyum Kim, Hyouk Ryeol Choi, “Development of Multi-Axial Force Sensing System for Haptic Feedback Enabled Minimally Invasive Robotic Surgery”, in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS2014), pp.4309-4314, 2014/09/14-2014/09/18.
• Uikyum Kim, Dong-Hyuk Lee, Baek-chul Kim, Choonghan Lee, Hyungpil Moon, Ja Choon Koo, Hyouk Ryeol Choi, “Design of Dual Axial Force Sensor for Minimally Invasive Robotic Surgery Grasper”, The 7th World Congress on Biomimetics Artificial Muscles and Nano-Bio (BAMN 2013), pp.82, 2013/08/26-2013/08/30.
• Dong-Hyuk Lee, Uikyum Kim, Hyungpil Moon, Ja Choon Koo, Woon Jong Yoon, and Hyouk Ryeol Choi, "Preliminary Design of Multi-Axial Contact Force Sensor for Minimally Invasive Robotic Surgery Grasper", in Proc. IEEE Int. Conf. Robotics and Automation (ICRA), pp. 1019-1024, 2013.
• Choonghan Lee, Dong-Hyuk Lee, Nguyen Canh Toan, UiKyum Kim, Dat Tien Nguyen, Hyungpil Moon, Jachoon Koo, Jaedo Nam, Hyouk Ryeol Choi, “Preliminary design and fabrication of smart handheld surgical tool with tactile feedback”, The 22nd IEEE International Symposium on Robot and Human Interactive Communication (ROMAN2013), pp.76-80, 2013.
-
Project
-
- • Qatar Nation Research Fund
- Development of smart minimum invasive surgery tools with tactile sensing capabilities for telerobot surgery system
- (2012. 4. 1 - 2015. 3. 31)
-
- • 선도연구센터지원사업 이공학분야(SRC/ERC)
-
의료용 촉감전달을 위한 요소기술 및 정보융합 수술 마스터 모듈 개발
-
(2015. 9. 1 - current)
Researcher
Uikyum Kim, Yong Bum Kim, Dong-Yeop Seok, Sojin Ho, Seung Yeon Lee