


Intelligent high precision robot and control
- OVER VIEW -
The Main issue with micro scale mechanics system have realized with strict fidelity complex shaped devices. Micro-electro mechanical system have currently constrained to complex fabrication and inadequate robustness. Therefore the force to actualize more precise is a matter of interest force sensing with micro or nano-scale range on high precision robot system.
Second Year, 3rd Intelligent High-Precision Robot
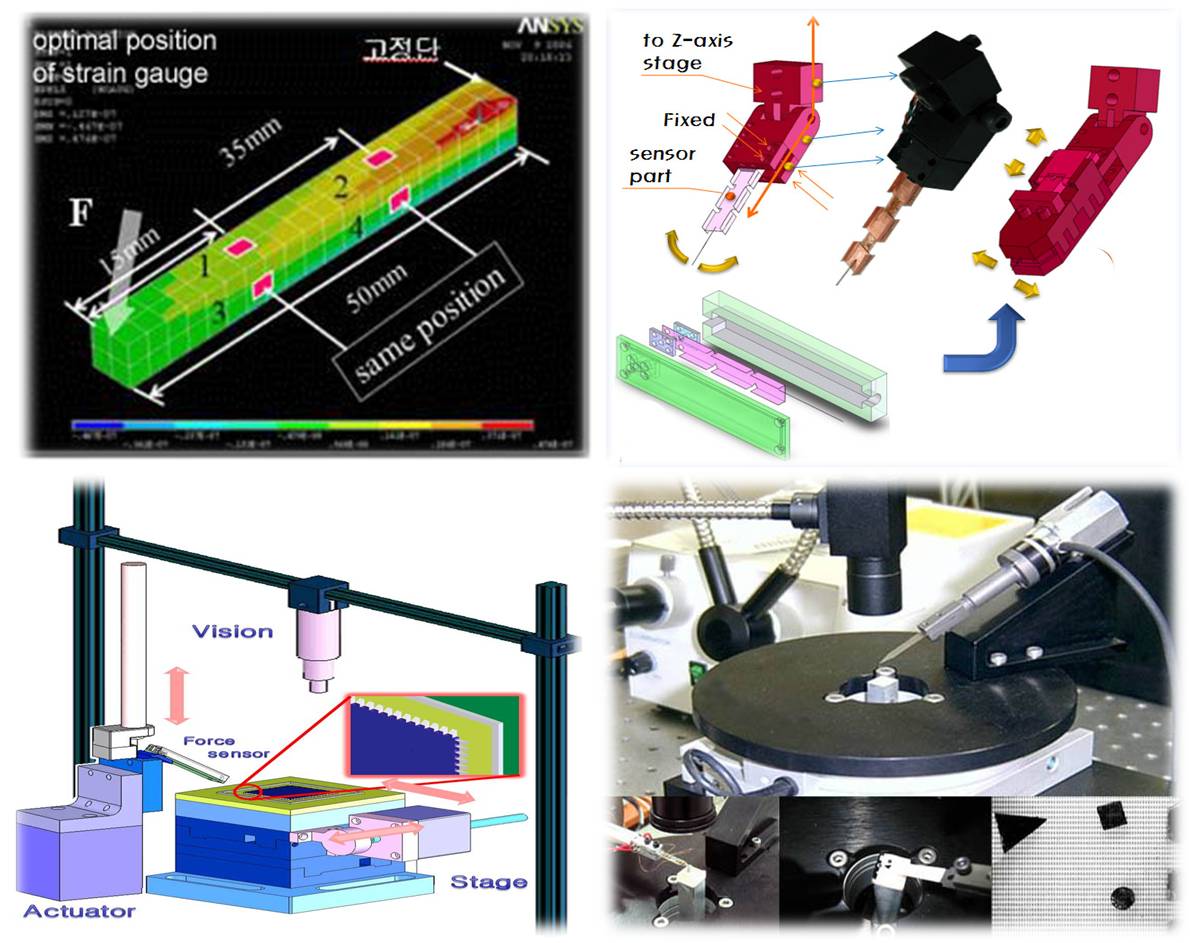
This measurement system is constructed two semiconductor strain gauges that are using to know the information about applied force and distance from discretional position. The sensing system is adopt to new architecture and moreover it is developed algorithm that has be located sensors at best optimized position to increase sensitivity and accuracy more than before.
First Year, 2nd Intelligent High-Precision Robot
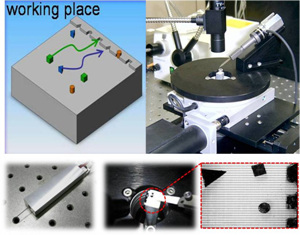
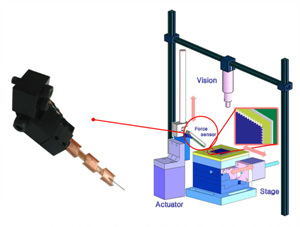
It is developed to control the displacement and force of high precision robot system that correspond to the IT product market place for coming generation and technical transition. The system is using the nano resolution displacement and force measurement sensor and manipulator. The system consists of base stage, manipulator and vision system. The base stage has four DOF (Degree of Freedom) based on the control system minimizing a transfer velocity deviation. For controlling force and displacement, this system effectively apply to nano/micro parts that have been demanded a high quality alignment. Using by strain gauge and 6 axis force/torque sensor, they are getting information of contact force contact position and applied force direction.
First Year, 1st Intelligent High-Precision Robot
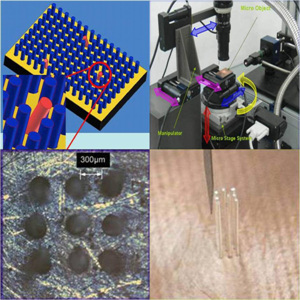
Repeatable manipulation and assembly of micro-scale component is a critical capability for future developments in optoelectronics, hybrid micro electro mechanical systems, and the integration of nano scale devices into larger systems.
Publications
- • 하승화, 최병준, 인용석, Tri Cong Phung, 이상무, 구자춘, 최혁렬, "마이크로 머니퓰레이션을 위한 미세 힘 측정향상 기법" 한국정밀공학회지, 제24권, 제7호 pp. 13-18, 2007.
- • 하승화, 최병준, 인용석, P.T. Cong, 이상무, 구자춘, 최혁렬, "마이크로 머니퓰레이션 시스템상에서의 미세 힘 측정력 향상(Improvement of Micro Force Sensing in Micro Manipulation System)" 한국정밀공학회 2007년도 춘계학술대회, pp. 165-166, 2007.
- • 유상헌, 최병준, Phung Tri Cong, 구자춘, 박상덕, 이상무, 최혁렬, "미세 부품의 조립을 위한 Micro Manipulator의 설계" 제1회 한국지능로봇 하계종합 학술대회, pp. 646-651, 2006.
- • 최병준, 유상헌, Phung Tri Cong, 구자춘, 박상덕, 이상무, 최혁렬, "초정밀 매니퓰레이션 시스템을 위한 다축 미세 힘 측정 방법의 개발" 제1회 한국지능로봇 하계종합 학술대회, pp. 631-638, 2006.
- • Y. S. Ihn, S. H. Ha, S. M. Lee, H. R. Choi, J. C. Koo, "The Binary Recognition Algorithm Using Point Correlation Template" The 4th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2007), pp. 564-569 2007.
- • Y.S. Ihn, S.H. Ha, B.J. Choi, H.R. Choi, J. C. Koo, "Design of a modified binary region median filtering for micro electronic device assembly manipulations" 2007 International Conference on Control, Automation,and Systems (ICASS 2007)", 2007.
- • Y. S. Ihn, H. S. Ha, B. J. Choi, H. R. Choi, S. M. Lee and J. C. Koo, "Design of a modified binary region median filtering for micro electronic device assembly manipulations International Conference on Control, Automation and Systems 2007" pp. 2749-2753, 2007.
- • Y. S. Ihn, S. H. Ryu, B. J. Choi, S. H. Ha, H. R. Choi, S. M. Lee and J. C. Koo, "An Enhanced Vision Processing Algorithm for a Micro-manipulation System IEEE International Workshop on Robotic and Sensors Environments 2007 (ROSE2007)" pp. 7-12, 2007.
- • P.T. Cong, B. J. Choi, S. H. Ryu, S. H. Ha, Y. S. Ihn, S. D. Park, J. C. Koo, H. R. Choi, "Contact Position and Force Sensing in Micro-manipulation The 13th International Conference on Advanced Robotics" pp. 272-277, 2007.
- • Byung June Choi, Sang Heon Ryu, Seung Hwa Ha, Tri Cong Phung, Ja Choon Koo, Sangdeok Park, Sangmoo Lee and Hyouk Ryeol Choi Development of Multi-axial Micro Force Measurement Method for Electronic Device Assembly" SICE-ICASE International Joint Conference 2006, pp. 1380-1384, 2006.
- • S. H. Ryu, B. J. Choi, T. C. Phung, J. C. Koo, S. D. Park, S. M. Lee, and H. R. Choi, "Design and control of a dexterous micro manipulator for the accurate miniature electro device assembly" SICE-ICASE International Joint Conference 2006, pp. 1376-1379, 2006.
Project
-
-
• 한국생산기술연구원
초정밀로봇 제어기술개발(초정밀 위치/힘 제어 알고리즘 개발 및 메커니즘 설계) , (2005. 7. 1 ~ 2007. 6. 30)
-
Researcher
Phung Tri Cong, Seung Hwa HA