


Heavy Payload Redundant Manipulator for Nuclear Decommissioning
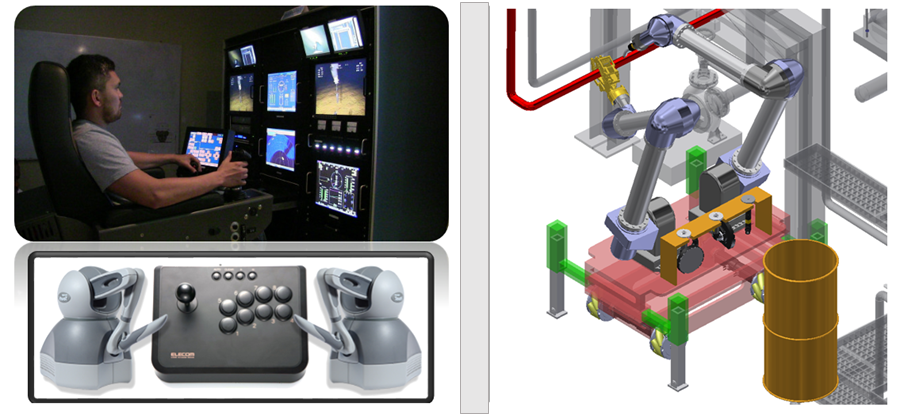
Nuclear decommissioning is the process whereby a nuclear facility is dismantled to the point that it no longer requires measures for radiation protection. The decommissioning tasks require work in the environments hostile to humans. Hence, remote operations and robotic systems are essential to this issue. One approach for addressing decommissioning operation is to develop mobile robots having dual manipulator. Our research focuses on developing heavy payload redundant(7-DoF) dual manipulator.
Project
• 산업통상자원부 (Ministry of Trade, industry & Energy(MI, Korea))
Development of 100kg-class dual arm for remote control of nuclear dismantling worker and technology of remote control ultifunctional equipment based on mobile platform
(2017.05.01 – 2020. 04.30)
Researcher
Yun Seok Choi, Hoang Phi Tien, Issac Rhee, Hosung Jang