


Modularized Mobile Robot
- OVER VIEW -
Personal robot is being researched world-wide. However, many robots consist of Non-standard part and software by professional robot companies and the robots used to be developed with their own design. The desired framework is to develop the personal robots composed of standard parts and thus the framework can improve the development procedures and system integration. As a premise to achieve this goal, however, the fundamental architecture in the related technologies such as standardization and modularization is need. In this research, architecture, design, and method for accelerating the development of personal robots are presented. Also a new object recognition technology required for the effective interaction between the robots and the intelligent environment is proposed.
Auto Recharging System
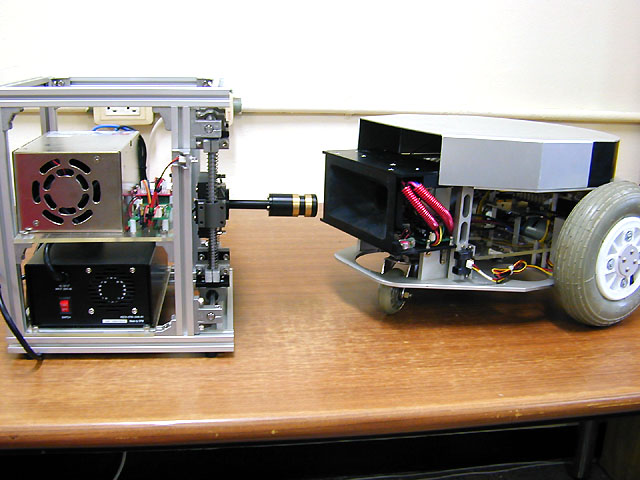
Auto recharging system is one of solutions for stay-alive problem of mobile robot. The auto recharging system consists of homing, docking mechanism and auto recharging circuit. The auto recharging system can make the mobile robot operate and stay alive except the mobile module. Therefore, the mobile robot can be the independent autonomous system which can do its tasks continuously with no help from users.
3D Tag-based RFID System

To help the mobile robot recognize the environment, the method using the RFID system is studied. The RFID system is easy to detect the objects and get the information of it. Especially, the detection feature of the passive tag, which is determined according to the direction of tag against the reader antenna can provide the information of the orientation as well as the position of objects. In this research, the sensing characteristics of the RFID system is modeled and the method for estimating the orientation and position of the objects is derived.
Suspension Mechanism

DRP I has novel suspension mechanism with shock absorber. Develop design of the novel suspension mechanism for differential steering type mobile robot with two wheels and two-casters. Suspension mechanism guarantees the safe and stable connection, and also maintenance of modules.
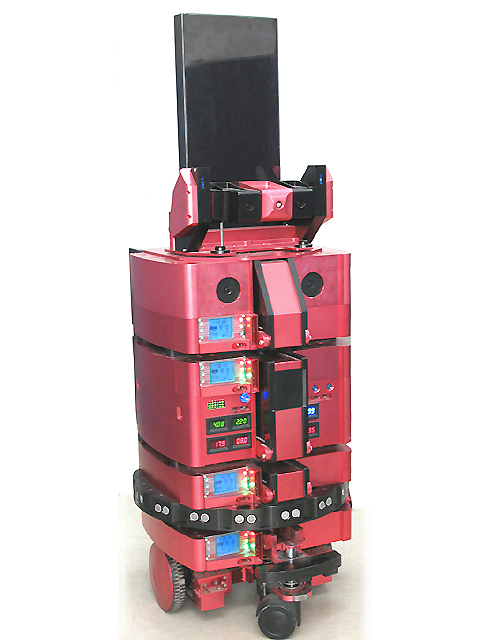
DRP I (2003-2004)

We study the infrastructure of modularization and standardization of the personal robot system.
- Architecture and method for accelerating the development of personal robots
- It includes the technology such as modularization with its own processing and standardization open to other developers.
- The architecture is implemented by developing the fully modularized personal robot DRP I
DHR I (2002
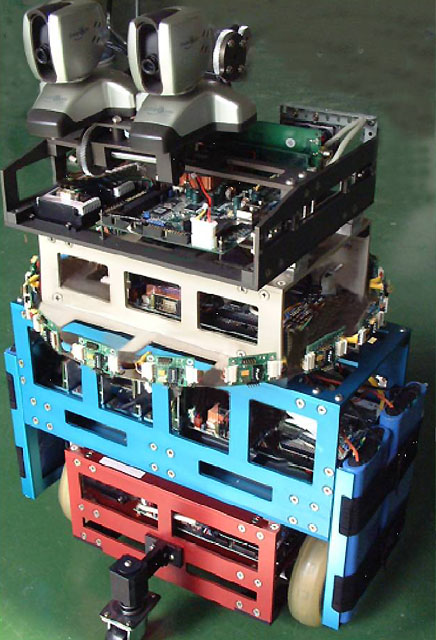
We propose the framework for developing the personal robot being used in home environments. We mainly focus on the system engineering technology such as the modularization with its own processing and standardization open to third parties. The fully modularized DHR I consists of five components such as brain, mobile, sensor, vision, and user interface modules. Each module can be easily attached to and detached from the whole system mechanically.
Publications
- • Se-gon Roh and Hyouk Ryeol Choi, 3D Tag-based RFID System for Recognition of Object, IEEE Trans. Automation Science and Engineering, 2008
- • Se-gon Roh, Jae Hoon Park, Young Kook Song, Hyouk Ryeol Choi, Kwan Woong Yang, Moo Sung Choi, Hong Seok Kim, Ho Gil Lee, Flexible Docking Mechanism with Error-Compensation Capability for Auto Recharging System, in Proc. Int. Conf. Ubiquitous Robots and Ambient Intelligence, pp. 570-575, 2007/11/21 ~ 11/24
- • Se-gon Roh, Young Hoon Lee, and Hyouk Ryeol Choi, Object Recognition Using 3D Tag-based RFID System, in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 5725-5730, 2006/10/9 ~ 10/15
- • Se-gon Roh, Young Hoon Lee, and Hyouk Ryeol Choi, Object Recognition Using 3D Tag-based RFID System, in Proc. Int. Conf. Ubiquitous Robots and Ambient Intelligence, pp. 172-177, 2005/11/2 ~ 11/4
- • Se-gon Roh, Jin Ho Park, Young Hoon Lee, and Hyouk Ryeol Choi, Object Recognition of Robot Using 3D RFID System, in Proc. Int. Conf. Control, Automation and Systems, pp. 62-67, 2005/6/2 ~ 6/5
- • S. G. Roh, K. H. Park, K. W. Yang, J. H. Park, H. S. Kim, H. G. Lee and H. R. Choi, Development of Dynamically Reconfigurable Personal Robot, in Proc. IEEE Int. Conf. Robotics and Automation, pp. 4023~4028, 2004/4/26 ~ 5/1
- • S. G. Roh, K. H. Park, K. W. Yang, J. H. Park, H. S. Kim, H. G. Lee and H. R. Choi, Dynamic Infrastructure for Personal Robot : DynI, in Proc. Int. Conf. Control, Automation and Systems, pp. 2039-2044, 2003/10/22 ~ 10/25
- • Jinho Park, Se-gon Roh, Kiheung Park, Hongseok Kim, Ho-Gil Lee and Hyoukryeol Choi, Design of Multilayered Suspension Mechanism for Differential Type Mobile Robot, in Proc. Int. Conf. Control, Automation and Systems, pp. 859-864, 2003/10/22 ~ 10/25
- • S. G. Roh, S. M. Baek, D. H. Lee, K. H. Park, T. K. Moon, S. W. Ryew, J. Y. KIm, T. Y. Kuc, H. S. Kim, H. G. Lee, H. R. Choi, Development of Personal Home Robot Platform : Approach for Modular Design, in Proc. Int. Conf. Control, Automation and Systems, pp. 2313-2318, 2002/10/16 ~ 10/19
- • 노세곤, 박재훈, 송영국, 양광웅, 최무성, 김홍석, 이호길, 최혁렬, 자동충전 시스템을 위한 오차보정이 가능한 유연한 도킹 메커니즘, 로봇공학회 논문지 2권 4호, pp. 288~295, 2007/12
- • 노세곤, 이영훈, 최혁렬, 3D RFID 시스템을 이용한 사물 인식, 제어 자동화 시스템공학 논문지, 제11권, 제12호, pp. 1027~1038, 2005/12
- • 노세곤, 박기흥, 양광웅, 박진호, 오기용, 김홍석, 이호길, 최혁렬, 동적 재구성이 가능한 퍼스널 로봇 플랫폼, 제어 자동화 시스템공학 논문지, 제10 권, 제 9 호, pp. 816~824, 2004/9
- • 노세곤, 이영훈, 박재훈, 송영국, 양광웅, 최무성, 김홍석, 이호길, 최혁렬, 자동충전 시스템을 위한 오차보정이 가능한 유연한 도킹 메커니즘, 한국지능로봇 하계종합학술대회, pp. 59~66, 2007/6/27~6/29
- • 노세곤, 이영훈, 최혁렬, 3D 태그기반 RFID 시스템을 이용한 사물인식, 한국지능로봇 하계종합학술대회, pp. 595~602, 2006/6/14~6/16
Project
-
-
• KITECH(Korea Institute of Industrial Technology)
Development of a standard interface of the personal robot (2001. 10 - 2004. 7)
Development of system engineering technology for the personal robot ( 2004. 8 - 2007. 7)
-
• KITECH(Korea Institute of Industrial Technology)
Researcher
Se Gon Roh, Jae Hun Park